概要
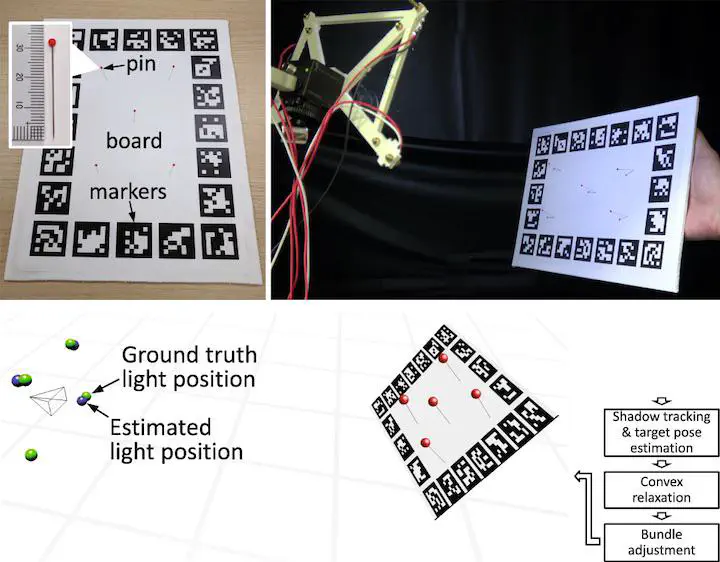
We present a method for geometric point light source calibration. Unlike prior works that use Lambertian spheres, mirror spheres, or mirror planes, we use a calibration target consisting of a plane and small shadow casters at unknown positions above the plane. We show that shadow observations from a moving calibration target under a fixed light follow the principles of pinhole camera geometry and epipolar geometry, allowing joint recovery of the light position and 3D shadow caster positions, equivalent to how conventional structure from motion jointly recovers camera parameters and 3D feature positions from observed 2D features. Moreover, we devised a unified light model that works with nearby point lights as well as distant light in one common framework. Our evaluation shows that our method yields light estimates that are stable and more accurate than existing techniques while having a much simpler setup and requiring less manual labor.